
XGBoost算法原理介绍2
Xgboost专题, 上海市, 2023
XGBoost 最初是由 Tianqi Chen 作为分布式(深度)机器学习社区(DMLC)组的一部分的一个研究项目开始的。XGBoost后来成为了Kaggle竞赛传奇——在2015年的時候29个Kaggle冠军队伍中有17队在他们的解决方案中使用了XGboost。
算法原理
XGBoost是在Gradient Boosting框架下面对GBDT的优化,是一种GBDT的工业级实现。其主要原理是在GBDT的基础上,在损失函数加入正则化部分,并且每一轮迭代对误差无法做二阶泰勒展开,加快对损失函数的优化速度。下面基于决策树弱分类器,梳理XGBoost算法的主流程,部分参数可能现在会看得有些懵懂,后面的内容会慢慢提到,这里先给一个整体的流程框架。
输入:
- 训练数据集$T={(x_1,y_1),(x_2,y_2),…,(x_N,y_N)},x_i\in X\subseteq R^n,y_i \in Y={-1,+1}$;最大迭代次数$M$,损失函数 $L(Y,f(X))$;正则化系数$\lambda,\,\gamma$。
- 输出:
- 强学习器 $f(x)$
- 初始化 $f_0(x)$
对$m=1,2,…,M$轮迭代有:
1)计算第$i$个样本($i=1,2,…,N$)在当前轮损失函数$L$基于$f_{m-1}(x_i)$的一阶导数$g_{mi}$,二阶导数$h_{mi}$,并求和:
\[G_m=\sum_{i=1}^{N}g_{mi}\] \[H_m=\sum_{i=1}^{N}h_{mi}\]2)基于当前节点尝试分裂决策树,默认分数 $score=0$,对特征序号$k=1,2,…,K$
- a)初始化$G_L=0,H_L=0$
b.1)将样本按特征 $k$ 从小到大排列,依次取出第 $i$个样本,依次计算当前样本放入左子树后,左右子树一阶和二阶导数和:
\[G_L=G_L+g_{mi},\,G_R=G-G_L\] \[H_L=H_L+h_{mi},\,H_R=H-H_L\]b.2)尝试更新最大的分数:
\[score=max(score,\,\frac{1}{2}\frac{G_L^2}{H_L+\lambda}+\frac{1}{2}\frac{G_R^2}{H_R+\lambda}-\frac{1}{2}\frac{(G_L+G_R)^2}{H_L+H_R+\lambda})\]
- 3)基于最大$score$对应的划分特征和特征值分裂子树
- 4)如果最大$score$为0,则当前决策树建立完毕,计算所有叶子区域的$w_{mj}$,得到弱学习器$h_m(x)$,更新强学习器$f_m(x)$,进入下一轮弱学习器迭代。如果最大$score$不是0,则继续尝试分裂决策树。
损失函数
XGBoost的损失函数在GBDT$L(y,\,f_{m-1}(x)+h_m(x))$的基础上,加入了如下的正则化:
\[\Omega(h_m)=\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2\]这里的 $J$ 是叶子节点的个数,而 $\omega_{mj}$ 是第 $j$ 个叶子节点的最优值。这里的 $\omega_{mj}$ 和在GBDT里面使用的 $c_{mj}$ 其实是一个意思,只是XGBoost论文里面使用 $\omega$ 符号表示叶子区域的值,这里为了和论文保持一致。
最终,XGBoost的损失函数可以表示为:
\[L_m=\sum_{i=1}^{N}L(y_i, f_{m-1}(x_i)+h_m(x_i))+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2\]如果要极小化上面这个损失函数,得到第$m$个决策树最优的所有$J$个叶子节点区域和每个叶子节点区域的最优解$\omega_{mj}$。XGBoost在损失函数优化方面做了一些优化,没有和GBDT一样去拟合泰勒展开式的一阶导数,而是期望直接基于损失函数的二阶泰勒展开式来求解。现在来看看这个损失函数的二阶泰勒展开式:
\[\begin{align} L_m &=\sum_{i=1}^{N}L(y_i, f_{m-1}(x_i)+h_m(x_i))+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2 \\ & \approx \sum_{i=1}^{N}\left(L(y_i, f_{m-1}(x_i))+\frac{\partial L(y_i,\,f_{m-1}(x_i))}{\partial f_{m-1}(x_i)}h_m(x_i)+\frac{1}{2}\frac{\partial^2 L(y_i,\,f_{m-1}(x_i))}{\partial^2 f_{m-1}(x_i)}h_m^2(x_i)\right)+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2 \end{align}\]为了方便起见,把第$i$个样本在第$m$个弱学习器的损失函数上面的一阶和二阶导数分别记为:
\[g_{mi}=\frac{\partial L(y_i,\,f_{m-1}(x_i))}{\partial f_{m-1}(x_i)},\,h_{mi}=\frac{\partial^2 L(y_i,\,f_{m-1}(x_i))}{\partial^2 f_{m-1}(x_i)}\]则,损失函数可以简化为:
\[L_m\approx \sum_{i=1}^{N}\left(L(y_i, f_{m-1}(x_i))+g_{mi}h_m(x_i)+h_{mi}h_m^2(x_i)\right)+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2\]对于第$m$轮的迭代,损失函数里面$L(y_i,f_{m-1}(x_i))$为参数项,对最小化无影响,可以直接去掉。
定义
\[I_j={i|q(x_i)=j}\]为第$j$个叶子节点的样本集合,经过$M$轮迭代完毕以后每个决策树(弱学习器)的第$j$个叶子节点的取值最终会是同一个值$\omega_{mj}$,因此,可以对损失函数继续化简:
\[\begin{align} L_m &\approx \sum_{i=1}^{N}\left(g_{mi}h_m(x_i)+h_{mi}h_m^2(x_i)\right)+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2 \\ & =\sum_{j=1}^{J}\left(\sum_{x_i \in R_{mj}}g_{mj}\omega_{mj}+\frac{1}{2}\sum_{x_i \in R_{mj}}h_{mj}\omega_{mj}^2\right)+\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2 \\ & = \sum_{j=1}^{J}[(\sum_{x_i \in R_{mj}}g_{mj})\omega_{mj}+\frac{1}{2}(\sum_{x_i \in R_{mj}}h_{mj}+\lambda)\omega_{mj}^2]+\gamma J \end{align}\]把每个叶子节点区域样本的一阶和二阶导数的和单独表示如下:
\[G_{mj}=\sum_{x_i \in R_{mj}} g_{mj},\,H_{mj}=\sum_{x_i \in R_{mj}} h_{mj}\]那么最终的损失函数形式可以表示为:
\[L_m=\sum_{j=1}^{J}[(G_{mj}\omega_{mj}+\frac{1}{2}(H_{mj}+\lambda)\omega_{mj}^2]+\gamma J\]现在有了最终的损失函数,回到前面讲到的问题,我们如何一次求解出决策树最优的所有$J$个叶子节点区域和每个叶子节点区域的最优解$\omega_{mj}$呢?
这个问题等价于下面两个子问题:
- 如果已经求出了第$m$个决策树的$J$个最优的叶子节点区域,如何求出每个叶子节点区域的最优解$\omega_{m }$?
- 对当前决策树做子树分裂决策时,应该如何选择哪个特征和特征值进行分裂,使最终的损失函数$ _m$最小?
第一个问题其实比较简单,如果树的结构$q(x)$已经确定的情况下,可以基于损失函数对$\omega_{m }$求偏导并令导数为0得出最佳的$\omega_{m }$,也就是每一个叶子节点的最优值表达式为:
\[\omega_{m }=\frac{G_{mj}}{H_{mj}+\lambda}\]将求得的最优$\omega_{m }$代回到损失函数,可视为每轮迭代时该轮弱学习器的最优值表达式:
\[L_m=-\frac{1}{2}\sum_{j=1}^{J}[\frac{G_{mj}}{H_{mj}+\lambda}]+\gamma J\]那么回到第二个问题,怎么样的树结构$q(x)$是最优的呢?
通常来讲,枚举所有可能的树的结构,然后计算该结构的分数是不太现实的。在实践当中,我们采用贪心的策略:
- 从深度为0的单一叶子节点开始,即所有的样本都在一个节点上
对于树的每一个叶子节点,尝试增加一个分裂点:
- 令$I_L,\,I_R$分别表示分裂点加入之后的左右叶子节点的样本集合,则有
- \[G_L=\sum_{i\in I_L}g_{mi}\]
- \[G_R=\sum_{i\in I_R}g_{mi}\]
- \[H_L=\sum_{i\in I_L}h_{mi}\]
- \[H_R=\sum_{i\in I_R}h_{mi}\]
- 令$I_L,\,I_R$分别表示分裂点加入之后的左右叶子节点的样本集合,则有
假如每次做左右子树分裂的时候,都可以最大程度地减少损失函数,则我们期望最大化下式:
\[\Delta L=-\frac{1}{2}\frac{(G_L+G_R)^2}{H_L+H_R+\lambda}+\gamma J-\left(-\frac{1}{2}\frac{G_L^2}{H_L+\lambda}-\frac{1}{2}\frac{G_R^2}{H_R+\lambda}+\gamma (J+1)\right)\]对上式进行整理,我们期望最大化的是:
\[L_{split}=\frac{1}{2}[\frac{G_L^2}{H_L+\lambda}+\frac{G_R^2}{H_R+\lambda}-\frac{(G_L+G_R)^2}{H_L+H_R+\lambda}]-\gamma\]
上式通常在实践当中用来评估分裂的候选点,也就是说,我们的决策树分裂标准不再使用CART树的均方误差,而是上式了。而具体如何分裂,将在下一节进行讨论。
分裂节点算法
精确搜索算法
- 对每一个节点,枚举所有的特征,对每一个特征,枚举所有的分裂点,目前大部分的GBDT算法实现(sklearn、R当中的GBDT)都是采用这种算法。
- 对每个特征,通过特征的取值将实例进行排序
- 寻求该特征的最优分裂点
- 对所有的特征采用如下的算法操作
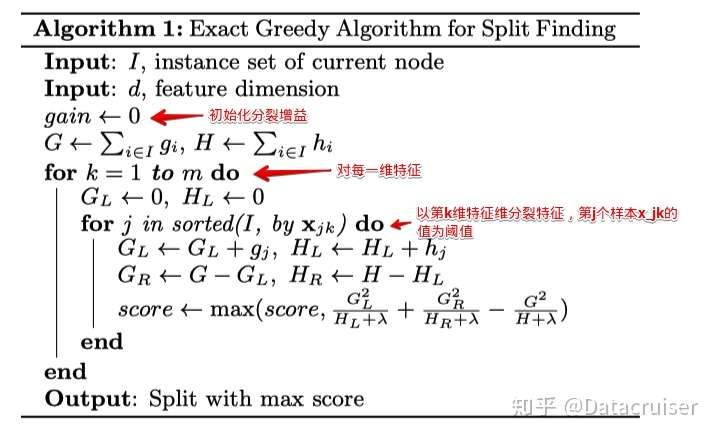
不难发现,对于连续型的特征,由于要枚举特征所有取值,计算量非常大,为了提高效率,通常将数据按照特征取值预排序。对于深度为$k$的树的时间复杂度:对特征所有取值的排序为$O(NlogN)$,$N$为样本点数目,若有$D$维特征,则$O(kDNlogN)$
近视搜索算法
精确搜索算法非常强大,但是当数据量大到内存无法存下时无法高效运行,并且在进行分布式计算时也存在一些问题,此时需要一个近视算法。主要思路如下: - 根据特征分布的百分位数,提出特征的一些候选分裂点 - 将连续特征值映射到桶里(候选点对应的分裂),然后根据桶里样本的统计量,从这些候选中选择最佳分裂点 - 根据候选提出的时间,分为: - 全局近似:在构造树的初始阶段提出所有的候选分裂点,然后对各个层次采用相同的候选 - 提出候选的次数少,但每次的候选数目多(因为候选不更新) - 局部近似:在每次分裂都重新提出候选 - 对层次较深的树更适合,候选分裂点的数目不需要太多
对于$G,H$的更新算法步骤如下:
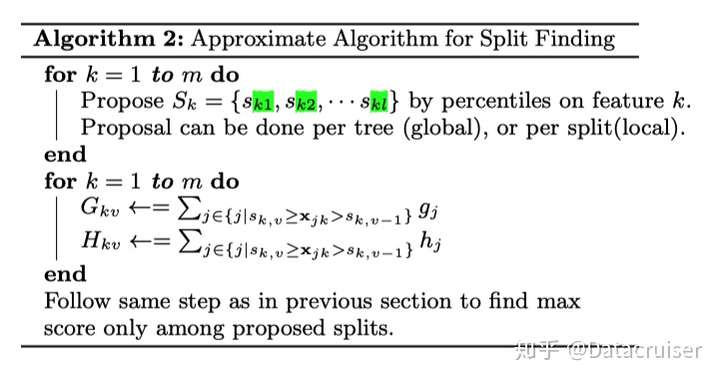
对于单机系统,XGBoost系统支持精确搜索算法,对于单机/分布式,全局近视/局部近视均支持。
正则化
总体上讲,XGBoost抵抗过拟合的方法与GBDT类似,主要也是从以下几方面考虑:
模型复杂度
正则化表达式为:
\[\Omega(h_m)=\gamma J+\frac{\lambda}{2}\sum_{j=1}^{J}\omega_{mj}^2\]这里的$J$是叶子节点的个数,而 $\omega_{mj}$ 是第$j$个叶子节点的最优值。
其中第一项叶子结点的数目$J$相当于$L_1$正则,第二项叶子节点的最优值相当于$L_2$正则。
Shrinkage
其思想认为,每次走一小步逐渐逼近结果的效果,要比每次迈一大步很快逼近结果的方式更容易避免过拟合。即它不完全信任每一个棵残差树,它认为每棵树只学到了真理的一小部分,累加的时候只累加一小部分,通过多学几棵树弥补不足。用方程来看更清晰,即给每棵数的输出结果乘上一个步长$\alpha$(learning rate)
对于前面的弱学习器的迭代:
\[f_m(x)=f_{m-1}(x)+T(x;\gamma_m)\]加上正则化项,则有
\[f_m(x)=f_{m-1}(x)+\alpha\, T(x;\gamma_m)\]此处,$\alpha$的取值范围为(0,1]。对于同样的训练集学习效果,较小$\alpha$的意味着需要更多的弱学习器的迭代次数。通常我们用步长和迭代最大次数一起决定算法的拟合效果。
特征采样和样本采样
XGBoost借鉴RF的思想,对于特征进行采样以达到降低过拟合的目的,根据用户反馈,特征采样比起样本采样效果更优。当然,XGBoost同时支持以上两种降低过拟合的采样方式。
Early Stop
对于每一次分离后的增益,即前面的
\[L_{split}=\frac{1}{2}[\frac{G_L^2}{H_L+\lambda}+\frac{G_R^2}{H_R+\lambda}-\frac{(G_L+G_R)^2}{H_L+H_R+\lambda}]-\gamma\]在sklearn接口当中,如果$L_{split}$出现负值,则提前停止;但是,被提前终止掉的分裂可能其后续的分裂会带来好处。在XBGoost原生接口当中是采用过后剪枝策略:将树分裂到最大深度,然后再基于上述增益计算剪枝。在具体实现当中还有learning rate等其它参数一起控制,给$L_{split}$出现负值的后续轮留机会。
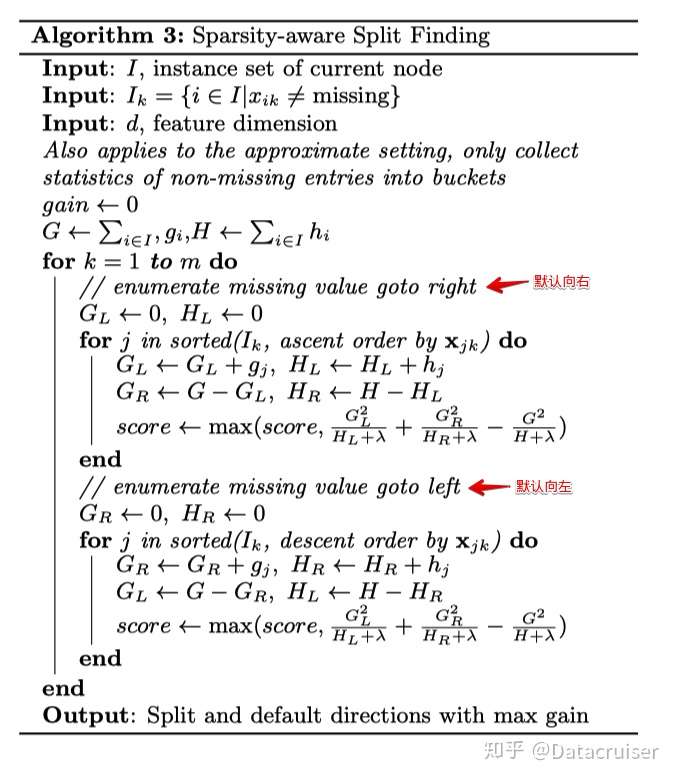
缺失值处理
在实际的工业实践当中,数据出现缺失无法避免。
XGBoost没有假设缺失值一定进入左子树还是右子树,则是尝试通过枚举所有缺失值在当前节点是进入左子树,还是进入右子树更优来决定一个处理缺失值默认的方向,这样处理起来更加的灵活和合理。
也就是说,上面第1节的算法的步骤a),b.1)和b.2)会执行2次,第一次假设特征$k$所有有缺失值的样本都走左子树,第二次假设特征$k$所有缺失值的样本都走右子树。然后每次都是针对没有缺失值的特征k的样本走上述流程,而不是所有的的样本。
如果是所有的缺失值走右子树,使用上面第1节的a),b.1)和b.2)即可。如果是所有的样本走左子树,则上面第1节的a)步要变成:
\[G_R=0,\,H_R=0\]b.1)步要更新为:
\[G_R=G_R+g_mi,\,G_L=G-G_R\] \[H_R=H_R+h_mi,\,H_L=H-H_R\]具体算法如下图所示:
优缺点
优点
- 支持线性分类器(相当于引入$L_1,\,L_2$正则惩罚项的LR和线性回归,损失函数公式=误差平方和+正则项,似LR)
- 损失函数用了二阶泰勒展开,引入一阶导和二阶导,提高模型拟和的速度
- 可以给缺失值自动划分方向
- 同RF,支持样本(行)随机抽取,也支持特征(列)随机抽取,降低运算,防过拟合
- 损失函数引入正则化项,包含全部叶子节点个数,每个叶子节点得分的$L_2$模的平方和(代表叶子节点权重的影响),控制模型(树)复杂度
- 每次迭代后为叶子分配结合学习速率,减低每棵树权重,减少每棵树影响,灵活调整后面的学习空间
- 支持并行,不是树并行,是把特征值先预排序,存起来,可以重复并行使用计算分裂点
- 分裂依据分开后与未分前的差值增益,不用每个节点排序算增益,减少计算量,可以并行计算
- 可以引入阈值限制树分裂,控制树的规模
缺点
- 往往会选择具有更高数量的不同值的预测器
- 当预测器具有很多类别时,容易过拟合
- 参数过多,调参困难
- 如果采用精确搜索算法对内存消耗过大,且不支持分布式
sklearn中的参数解释
sklearn本身的文档当中并没有XGBoost的描述,Github上面看到主要参数如下:
- max_depth :树的最大深度。越大通常模型复杂,更容易过拟合,这里作为弱学习器一般设置为1-10
- learning_rate:学习率或收缩因子。学习率和迭代次数/弱分类器数目n_estimators相关。 缺省:0.1 (与直接调用xgboost的eta参数含义相同)
- n_estimators:弱分类器数目. 缺省:100
- verbosity:控制输出
- slient:参数值为1时,静默模式开启,不输出任何信息
objective:待优化的目标函数,常用值有:
- binary:logistic 二分类的逻辑回归,返回预测的概率
- multi:softmax 使用softmax的多分类器,返回预测的类别(不是概率)
- multi:softprob 和multi:softmax参数一样,但是返回的是每个数据属于各个类别的概率
- 支持用户自定义目标函数
- booster:选择每次迭代的模型,有两种选择:
- gbtree:基于树的模型,为缺省值
- gbliner:线性模型
- dart:树模型
- nthread:用来进行多线程控制。 如果你希望使用CPU全部的核,那就用缺省值-1,算法会自动检测它
- n_jobs:xgboost运行时的线程数,后续代替
nthread参数 - gamma:节点分裂所需的最小损失函数下降值,缺省0
- min_child_weight:叶子结点需要的最小样本权重(hessianhessian)和
- subsample:构造每棵树的所用样本比例(样本采样比例)
- colsample_bytree:构造树时每棵树的所用特征比例
- colsample_bylevel:构造树时每层的所用特征比例
- colsample_bynone:构造树时每次分裂的所用特征比例
- reg_alpha:$L_1$正则的惩罚系数
- reg_lambda:$L_2$正则的惩罚系数
tree_method string [default= auto]:XGBoost中使用的树构造算法
- XGBoost支持hist和大规模分布式训练,仅支持大规模外部内存版本。
- 选择: auto, exact, approx, hist, gpu_hist
- auto: 对于中小型数据集,将使用精确的贪婪(精确)
- 对于非常大的数据集,将选择近似算法(近似)
- 因为旧版本总是在单个机器中使用精确贪婪,所以当选择近似算法来通知该选择时,用户将得到消息
- auto: 对于中小型数据集,将使用精确的贪婪(精确)
- exact: 精确的贪婪算法
- approx : 使用分位数草图和梯度直方图的近似贪婪算法
- hist:快速直方图优化近似贪心算法
- gpu_hist:hist算法的GPU实现
- scale_pos_weight:正负样本的平衡,通常用于不均衡数据
- base_score:初始预测值
- random_state:随机种子
- missing:缺失值
- importance_type:特征重要程度计算方法
除了以上参数,XGBoost原生接口当中参数众多,主要有以下4大类:
- General parameters
- Booster parameters
- Learning task parameters
- Command line parameters(较少用到)
如果有遗漏,具体可以参阅XGBoost Parameters
应用场景
XGBoost是GBDT框架的工业级优化实现,所有GBDT能够应用的场景,XGBoost都可以应用,所有回归问题(线性/非线性)、二分类问题(设定阈值,大于阈值为正例,反之为负例)。
按业务领域分,推荐系统、反欺诈、信用评级等。